1. Microvision
This research topic deals with the optimization of complex vision systems.
Vision system configuratorThe developed configurator is an expert module that improves the ease of use of versatile industrial vision systems. It assists the operator by automatically providing optimal parameter settings for a new configuration of the working environment. It relieves him from the tedious task of system setup. In operation, the configurator learns from a small number of examples and derives a system setting with optimal expected performance. The developed assistant is currently operational in the case of the visual inspection of IC markings. The benefit is an improved and faster system setup. |
 Badly configured vision system |
- burr measurement and analysis
- wood topographic analysis
2. 3D computer vision
Modern range cameras provide means to measure 3D surfaces easily and automatically, but also set the need for new 3D data interpretation methods.
3D scene analysis3D vision surpasses the limitations of classical video vision in applications like control. surveillance and security. This ends difficulties with shadows and other foreign illumination effects. |
 Pedestrian detection by 3D vision |
From real to virtual objectsModeling 3D objects requires the measurement of the object under different views and the subsequent assembly of the views. 1) The measurement is performed by a 3D-scanner that acquires range images 2) Several range images corresponding to different views are needed in order to obtain measurements that cover the complete object 3) During assembly, the various views must be brought together. It requires an exact positioning of the geometry and the merging of the data meshes derived from each range image. The final model describes the full geometry and the color of the object. Applications of 3D modeling are numerous: industrial design, reverse engineering, simulation, 3D photography, building and updating virtual environments, object recognition, ... |
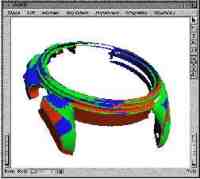 Reverse engineered model of a watch frame |
- fast 3D matching methods
- micro-particle modeling