Partners: CSEM
Present global vision systems are not adequate for robot control in an assembly environment where individual components have sizes in the range of 1 to 100 micrometers, since current systems do not provide sufficient resolution in the whole workspace when they are fixed, and they are too bulky to be brought close enough to the components. A local 3D vision system (fig. 1) is expected to provide two decisive advantages: high accuracy and high exibility. The project aims to research 3D vision sensors easily embedded in a micro-assembly robot
|
|
Accuracy, size and weight constraints for the embedded vision sensor were defined. Based on those constraints, a screening of 3D vision methods was performed. The most promising method, multifocus acquisition, was selected for further investigation. The image acquisition and processing element of the embedded system were prototyped and tested on typical assembly scenes. The accuracy was compared to measurements with a reference microscope system.
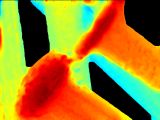
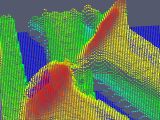
Experiments ( fig. 2,3 & 4) carried out with multifocus imaging. The applicability of multifocus imaging to micro-assembly was confirmed:
[1] J. Mure-Dubois, H. Hügli, "Embedded 3D vision system for automated micro-assembly", Proc. Conf. Two- and Three-Dimensional Methods for Inspection and Metrology IV, Proc. SPIE Vol. 6382-20, 2006 - Abstract - Postprint on RERO
mu / |