We consider a geometrical map reconstruction that relies on the topological knowledge and uses redundant odometric measurements taken while the robot moves along the paths of the topological map. Five methods are investigated and compared in experiments involving a Nomad200 mobile robot operating in a real environment.
Topological maps represent the environment in terms of neighborhood relationships between distinctive places and are represented by graphs. In the frame of this work, each node corresponds to a self-positioning site, and an edge to the displacement of the robot between two such sites. The behavior associated with the nodes are the homing on corner and the localization behaviors, while a move to behavior goes with edges.
The topological map is extended by adding geometrical information. The idea is to record the odometer path while the robot moves, between sites, along the edges of the topological graph. The result is a series of odometric paths, which must be integrated to form a consistent global map.
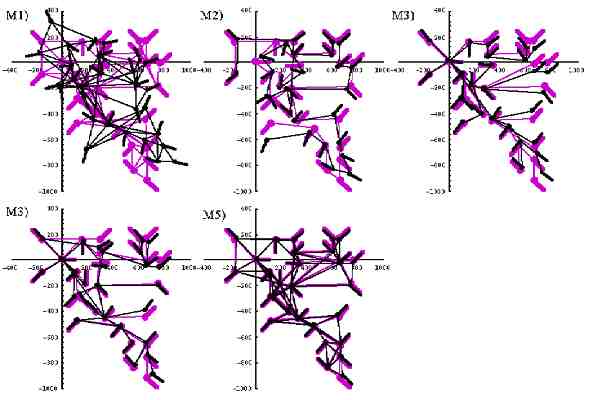
Figure below compares the reconstructed maps obtained with 5 different methods out of the odometric paths recorded while the robot moves in the topological map.
F. Tièche & H. Hügli, From topological knowledge to geometrical map, Control Engineering Practice, to appear
F. Tièche & H. Hügli, From topological knowledge to geometrical map, Proceedings of the 3rd IFAC Symposium on Intelligent Autonomous Vehicles, 25-27 March 1998, Madrid, Spain
hu / |